07. Prediction Step
Prediction Step
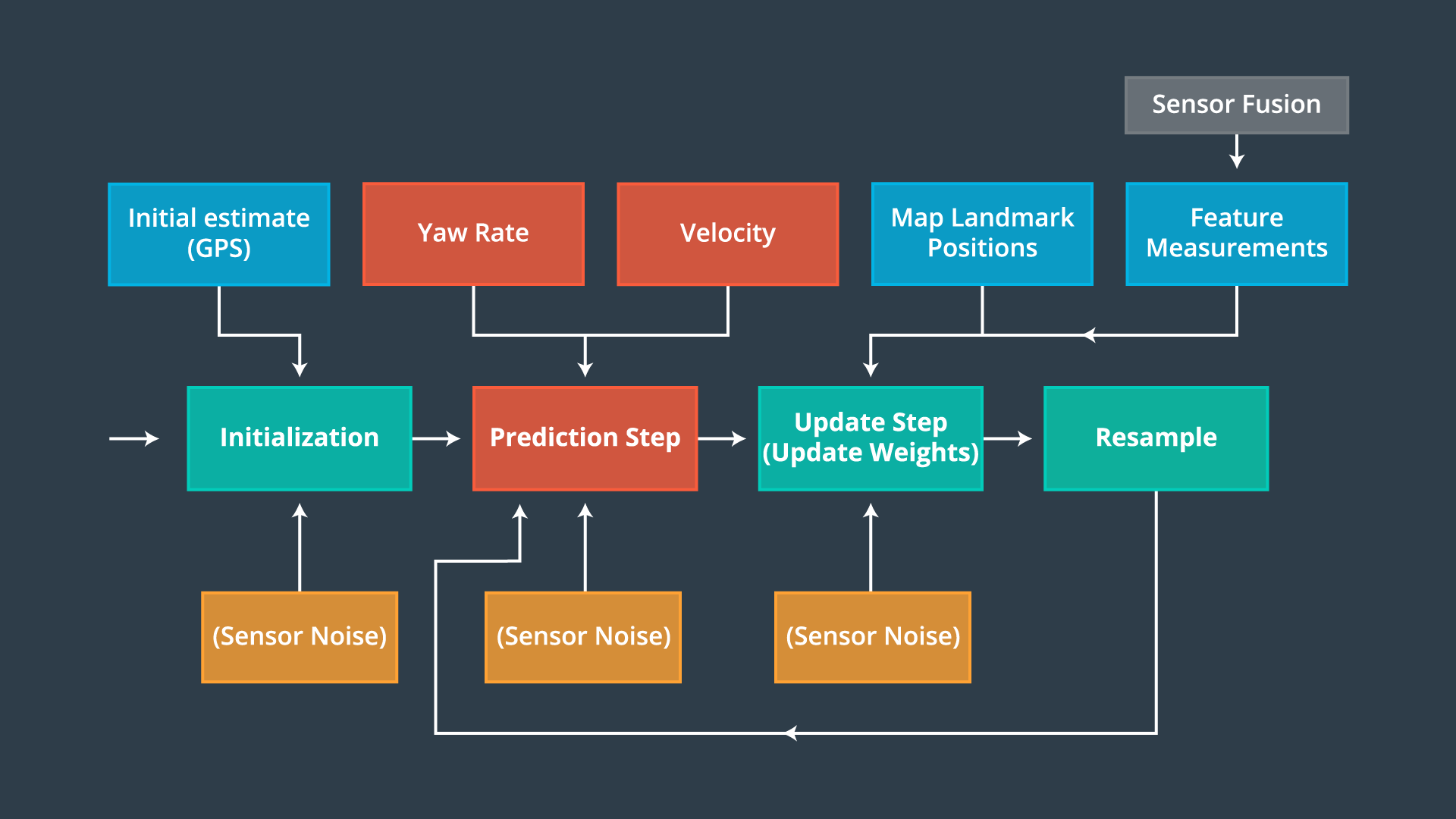
Now that we have initialized our particles it's time to predict the vehicle's position. Here we will use what we learned in the motion models lesson to predict where the vehicle will be at the next time step, by updating based on yaw rate and velocity, while accounting for Gaussian sensor noise.